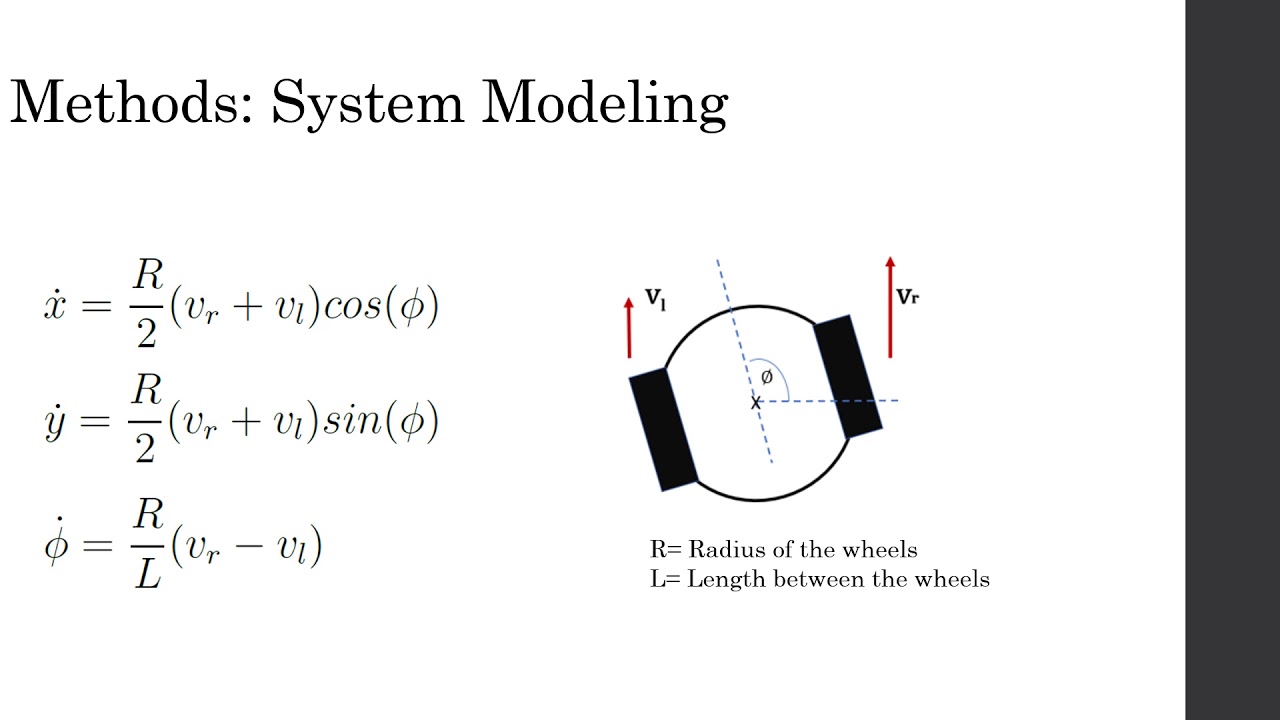
System Modeling: Path Tracking for Differential Steering Drive Autonomous Robots Computational Medicine Lab 4:37 4 years ago 11 090 Скачать Далее
03: Path Planning with a Differential Drive Robot V-Rep/CoppeliaSim | Tutorial Nikolai K. 48:25 10 years ago 92 430 Скачать Далее
Autonomous differential drive robot obstacles avoidance and path tracking TODAYS TECH 0:23 1 year ago 62 Скачать Далее
Trajectory Following Controller using Bezier Curves for a Differential Drive Robot Kousheek Chakraborty 2:43 2 years ago 266 Скачать Далее
Global Path Planning vs Local Path Planning Energid Technologies 0:22 5 years ago 5 450 Скачать Далее
Path Planning of Differential Drive robot using PID Control in Simulink TODAYS TECH 1:24 8 months ago 714 Скачать Далее
Trajectory following control for a differential drive robot Huan Weng 0:43 5 years ago 156 Скачать Далее
Path Planning with A* and RRT | Autonomous Navigation, Part 4 MATLAB 17:55 4 years ago 178 745 Скачать Далее
Differential Drive Robot Kinematics Simulink Model || Path planning of Differential Drive Robot TODAYS TECH 0:32 8 months ago 285 Скачать Далее
Optimal Path Planning and Following for Autonomous Race Cars TODAYS TECH 0:16 4 months ago 37 Скачать Далее
Path Tracking Control of a Differential Drive Robot using MATLAB & SImulink Aaron Díaz 0:13 4 years ago 2 613 Скачать Далее
differiential wheeled robot path following animation Juan Sebastian Dueñas Salamanca 1:12 2 years ago 143 Скачать Далее
Autonomous complete coverage path planning and following with unmanned surface vehicle (USV) Jan Henrik Lenes 1:58 5 years ago 2 233 Скачать Далее
Autonomous Car simulated with Python Mouad Boumediene - Hobby Coding 7:59 3 years ago 25 564 Скачать Далее